Anteriormente en nuestra pagina, se les dio a conocer información sobre los AGV de manera superficial , y se menciono todas sus aplicaciones de uso para dar solución a los viajes rutinarios de una empresa u otra institución, incluso sus tipos de sistema de guiado, hoy en este apartado, se tomara un tema mas complejo e interesante, llevándonos a la profundidad de los robots AGV.
¿Cómo programar un robot AGV?
La manera de como programar un robot AGV, principalmente se requieren de dos herramientas importantes.
La primera de ellas se denomina LDK (Layout Definition Kit), el LDK es una herramienta de CAD que permite programar de un modo muy visual los caminos, estaciones, y maniobras en el mismo archivo de dibujo Autocad (con extensión .dwg) del layout de la instalación.
Además, con esta misma herramienta, definiremos tanto los segmentos entre estaciones de los posibles recorridos como la ubicación de los reflectores de la instalación dibujándolos en el mismo archivo de Autocad.
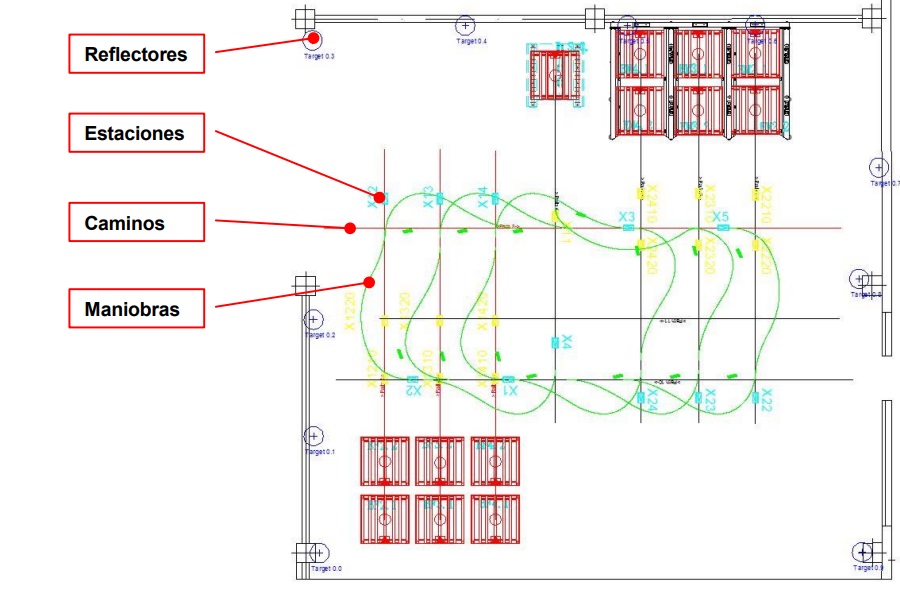
Para programar un robot AGV y puedan realizar los transportes en la instalación, es necesario primero definir las trayectorias entre los puntos de carga, descarga y estaciones de carga de batería. También es necesario ubicar los reflectores de posicionamiento en el layout para que los AGVs sepan en cada momento sus coordenadas exactas.
Con la herramienta LDK se generan archivos con código de más bajo nivel llamados comandos y funciones ACE que se cargan directamente a los AGV, dichos comandos pueden ser de movimiento entre dos coordenadas pero también instrucciones para programar el AGV, para realización de tareas.
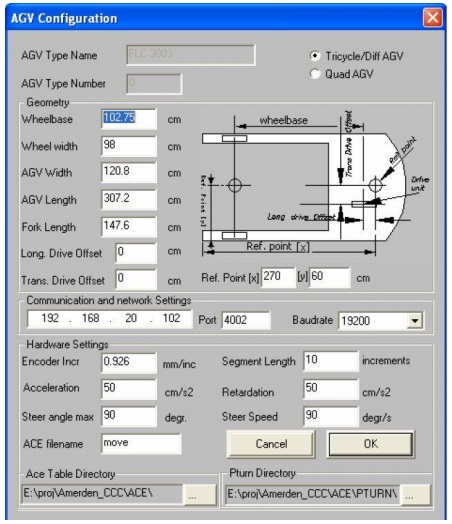
Un paso previo para que el LDK calcule la trayectoria exacta que el vehículo realiza por su geometría es definir la en la configuración. También se definen parámetros referentes a la comunicación wifi/IP y detalles técnicos del vehículo tales como el incremento de tracción, aceleración nominal del motor de tracción, ángulo máximo de giro de la rueda motriz, etc. LDK permite definir vehículos de tipo triciclo, diferencial y quad.
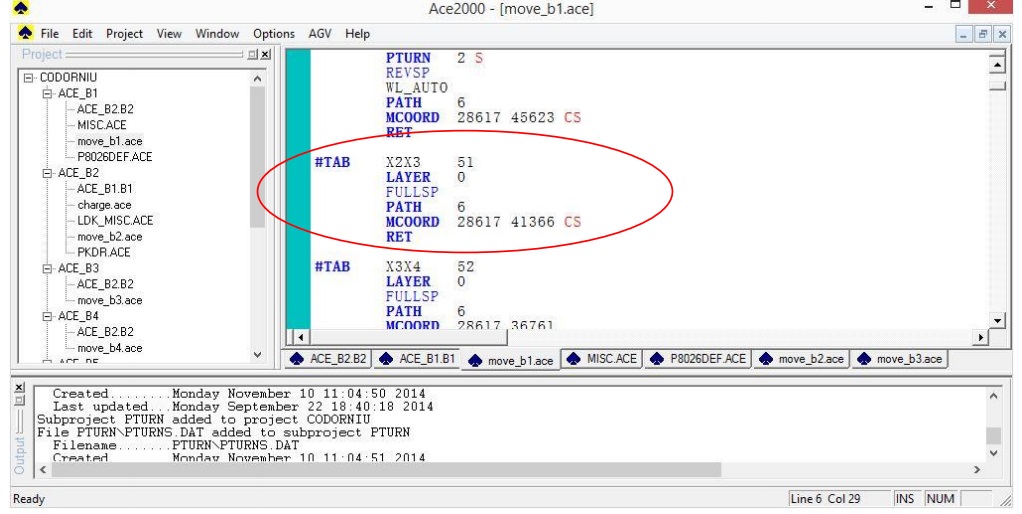
Una vez el layout con los recorridos está definido, la herramienta LDK es capaz de codificar toda la información introducida en forma de tablas. Estas tablas son transmitidas a la CPU del AGV mediante la herramienta ACE2000, la herramienta LDK genera automáticamente un fichero ACE con el contenido de los movimientos (segmentos) programados.
Además de la codificación de los segmentos, también es posible programar las maniobras de carga y descarga, estas se programan en lenguaje de instrucciones, las instrucciones programables de una maniobra de carga en altura son, por ejemplo, posicionar horquillas a altura de carga, distancia de avance marcha atrás hasta encontrar la carga, subir las horquillas hasta altura de descarga, distancia de avance marcha adelante, bajar horquillas hasta altura de transporte.
En los archivos generados encontramos tablas relativas a las coordenadas de los segmentos, ubicación de los reflectores, ubicación y desarrollo de las curvas además de parámetros relativos a velocidades y carga de baterías.
Maniobras de carga
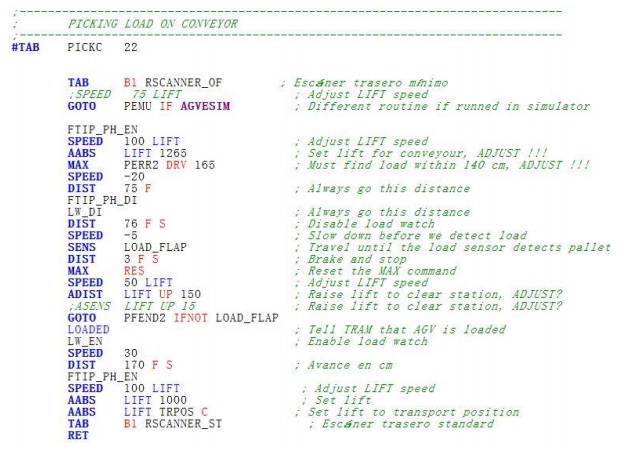
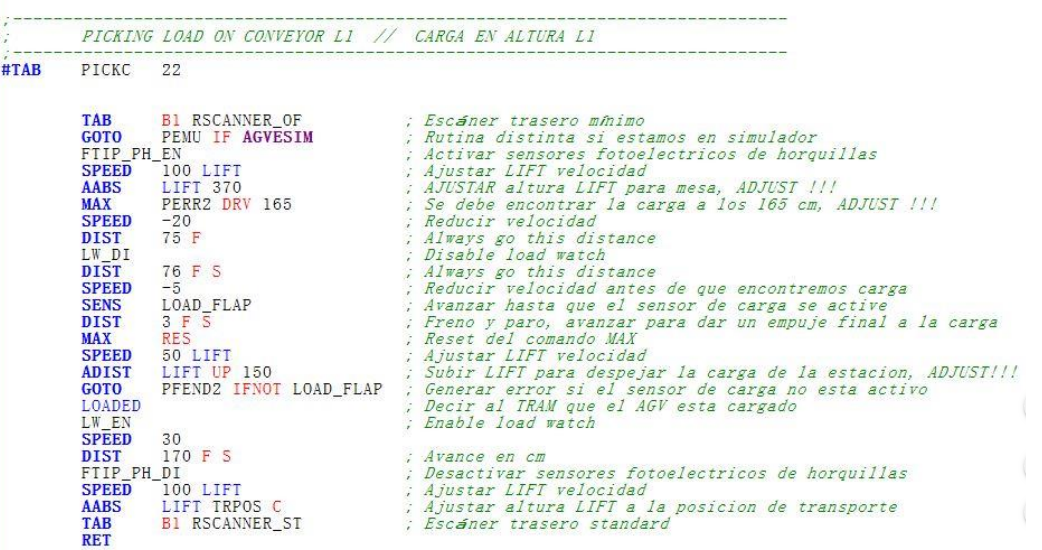
Para programar un robot, se definen dos maniobras de carga para la instalación, una para la estación de carga de L1 y otra para la de L2. En ambos casos se escoge como plantilla de la maniobra de carga en altura. Se definen como dos funciones con nombres distintos.
La definición de la maniobra para la carga en L1 es la siguiente. La descripción de cada acción se encuentra en color verde a su derecha:
Maniobras de descarga
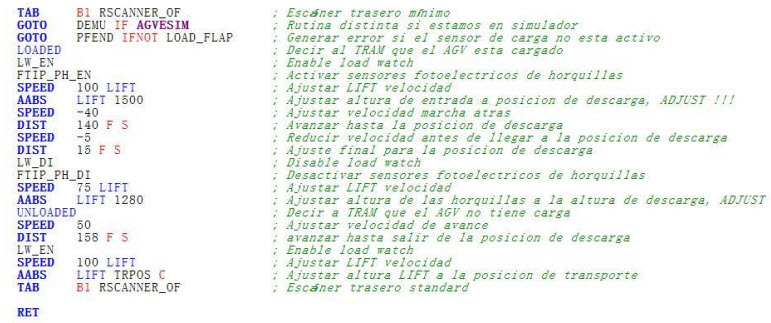
Se definen dos maniobras de descarga para la instalación, una para los vagones de L1 y otra para los de L2. En ambos casos se escoge como plantilla de la maniobra de descarga en altura, se definen como dos funciones con nombres distintos.
La definición de la maniobra para la descarga en L1 es la siguiente, La descripción de cada acción se encuentra en color verde a su derecha:
Para adquisición de estos productos visita nuestra pagina Logicbus
Contáctanos






ventas@logicbus.com | soporte@logicbus.com | 55-5431-67-18 | Iniciar conversación